圆柱坐标洁净机械手臂 PHT-R-4
联系我们
产品特点
本产品是用于洁净室的水平多关节机器人。
可进行前后(X轴)、旋转(θ轴)、上下(Z轴)+ 手动旋转(0~180°)操作,支持大气中的晶圆转移。 驱动电机为交流伺服电机,所有轴均采用绝对编码器规格。
产品概要
| 型号名称 | PHT-R-4 |
|---|---|
| 安装环境 | 无尘室内大气环境、温度:10℃~35℃、湿度:70%RH以下 |
| 手臂 | 单臂 材质:铝、CFRP、陶瓷 |
| 作业范围 | X轴:500mm θ轴:340度 Z轴:300mm 手转:0~180° |
| 运行速度(最快) | X轴:500mm/sec θ轴:200deg/sec Z轴:250mm/sec 手动旋转:180deg/sec |
| 有效载荷 | 3kg (hand base·hand·total work weight) |
机械手臂标准规格
| 机械手臂型号 | PHT-R-4-2022 |
|---|---|
| 被搬送物 | ~300mm晶圆 (我们还可以灵活定制其他特殊工件、形状和材料。) |
| 晶圆吸附方式 | 真空吸附/边缘夹持/边缘保持 |
| 机械结构格式 | 水平多关节型 圆柱坐标系 |
| 控制轴 | 4轴 |
| 电机类型 | 交流伺服电机 绝对编码器规格 |
| 重量 | 本体重量:约47Kg 控制器:约8Kg |
| 控制电缆 | 3m(标准)、5m、10m |
| 控制规格 (1) | 并行接口 32点输入 32点输出 |
| 控制规格 (2) | 串行接口 RS-232C x 1线 |
| 重复性精度 | ±0.1mm以内 |
| 洁净度 | ISO标准 Class 2级(0.1 μm以上,10个/m³以下) |
| 厂务 | 额定电压:单相AC200-230V±10% 额定电流:5A 真空:-80kPa以下10NL/min以上 |
| 控制器规格 | |
| 控制器型号 | MFD |
| 控制通讯方式 | RS232C 1线 数字IO输入:32点,DC24V 8mA 输出:32点,DC24V±3V 0.1A以下 |
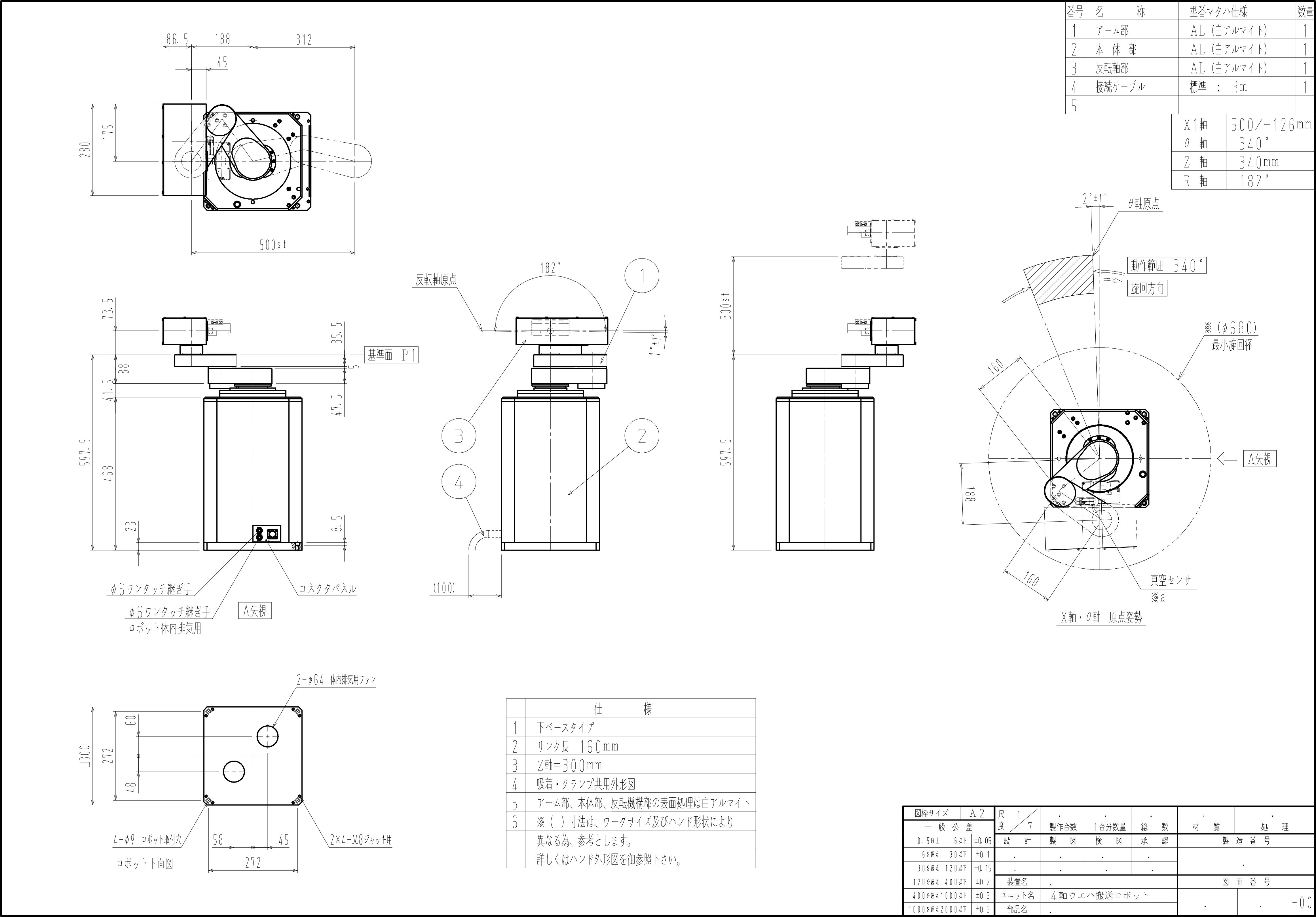
外观图(标准规格)
此图表的内容是菲科半导体(张家港)有限公司的知识产权,并被视为机密信息。请不要在未经许可的情况下复制或向第三方披露。